


工控机实时操作系统:硬实时保障,工业精确控制的时间锚点
发布时间:2026-05-20作者:广东汉为信息技术有限公司
返回列表
什么是实时操作系统?
实时操作系统(RTOS)不是"运行速度快"的系统,而是"响应时间确定"的系统。普通操作系统追求吞吐量,RTOS追求确定性——该1微秒响应的,绝不用2微秒。
在工业控制中,一个微秒的抖动可能导致半导体晶圆报废、电力继电保护误动、机器人轨迹偏移。RTOS就是为这种场景而生的。

硬实时 vs 软实时
| 对比维度 | 硬实时 | 软实时 |
|---|---|---|
| 定义 | 超时即失败,后果不可逆 | 超时可容忍,性能降级 |
| 响应延迟 | 微秒级,确定性保证 | 毫秒级,统计性保证 |
| 典型场景 | 电力继电保护、半导体制造 | 产线数据采集、HMI界面 |
| 超时后果 | 设备损坏、安全事故 | 效率下降、体验变差 |
| 调度策略 | 严格优先级抢占 | 公平调度 + 优先级 |
核心技术指标
- 中断抖动:≤1μs,中断从触发到进入ISR的时间波动范围
- 任务切换延迟:≤5μs,高优先级任务抢占低优先级任务的切换耗时
- 优先级抢占调度:高优先级任务随时打断低优先级任务执行
- 硬中断管理:中断嵌套、中断屏蔽精细化控制
- IEEE 1588时钟同步:亚微秒级网络时钟同步,分布式系统时间一致
- 看门狗容错:任务超时自动复位,防系统死锁
主流RTOS方案对比
| 方案 | 类型 | 实时性 | 生态 | 适用场景 |
|---|---|---|---|---|
| RT-Linux(PREEMPT_RT) | 开源 | 软实时为主 | 丰富 | 数据采集、HMI、边缘网关 |
| VxWorks | 商用 | 硬实时 | 成熟 | 航空航天、轨道交通 |
| QNX | 商用 | 硬实时 | 汽车/医疗 | 自动驾驶、医疗器械 |
| RT-Thread | 国产开源 | 硬实时 | 快速成长 | 全国产化工控、嵌入式 |
| FreeRTOS | 开源 | 硬实时 | MCU生态 | 小型嵌入式、传感器节点 |
典型应用场景
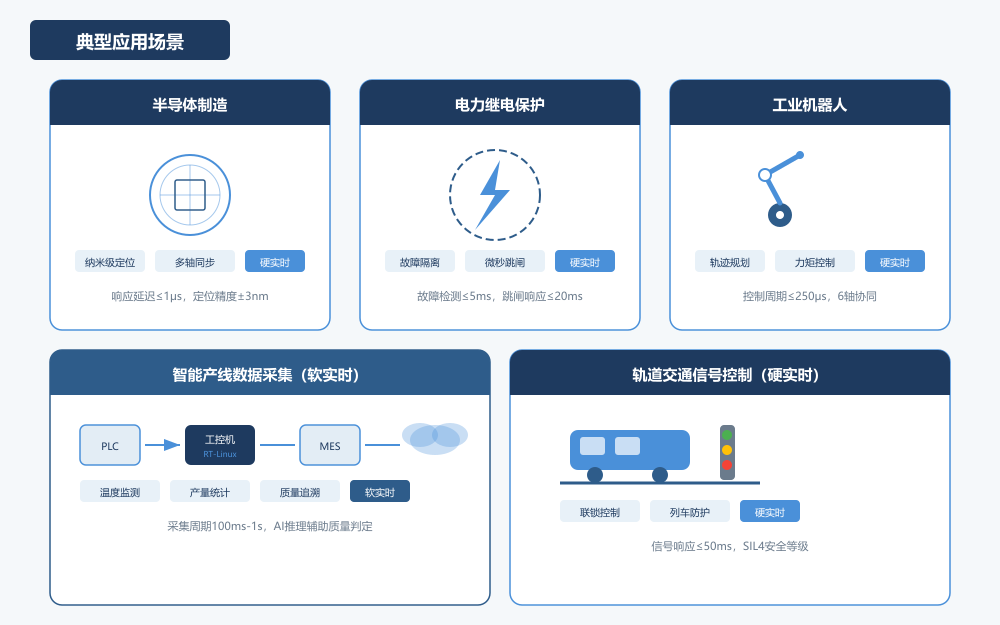
半导体制造
晶圆光刻、蚀刻工序要求多轴运动控制同步精度在纳秒级。RTOS确保各轴控制指令严格时序对齐,一片晶圆的良率可能就取决于几个微秒的偏差。
电力继电保护
故障电流检测到跳闸指令执行,必须在5ms内完成。超时意味着设备烧毁甚至电网事故。硬实时RTOS是这道防线的底层保障。
工业机器人
多关节协同运动、力控反馈、安全急停——所有环节都要求确定性响应。一个控制周期的抖动可能导致轨迹偏移、工件报废。
轨道交通信号
列车间隔控制、道岔联锁、信号机切换,任何超时都可能引发安全事故。VxWorks、RT-Thread等硬实时系统是行业标配。
AI工控机的实时性挑战
AI推理任务计算量大、执行时间不确定,与硬实时控制的确定性要求天然矛盾。解决方案是算力隔离:
- 硬件隔离:实时核跑RTOS控制任务,AI核跑推理任务,物理隔离互不干扰
- 软件隔离:通过虚拟化(如Jailhouse)将CPU分区,实时分区与AI分区独立运行
- 优先级保障:AI推理以低优先级后台运行,实时控制任务随时抢占
这样工控机既能做精确控制,又能跑智能推理,两不误。
选型建议
- 确定实时等级:先分清硬实时还是软实时,再选方案
- 关注中断延迟:硬实时场景要求中断抖动≤1μs
- 评估生态需求:需要丰富驱动和协议栈选RT-Linux,要全国产选RT-Thread
- 验证确定性:跑压力测试,用示波器测量最坏情况响应时间
- 规划长期维护:商用方案有技术支持,开源方案需自建团队能力
总结
实时操作系统是工控机的"时间锚点"——没有确定性响应,工业精确控制就是空谈。从半导体到电力,从机器人到轨道交通,硬实时保障是工业安全的底线。
随着AI工控机普及,如何在算力与确定性之间找到平衡,是下一个十年的核心命题。




售前电话:4008-616-216售前邮箱:sales@hwsys.cn
售后电话:4008-616-216售后邮箱:support@hwsys.cn
- 产品服务模块化工控机嵌入式工控机服务器/工作站标准主板AI人工智能计算模组工业平板电脑软件系统定制服务
- 解决方案矿山电力交通石化轨交储能水务机器人智能制造
- 服务与支持资料下载维修申请问题反馈
- 关于汉为公司介绍发展历程企业荣誉技术创新核心优势合作伙伴联系我们