


AGV小车控制器为什么常用嵌入式工控机?选型要看哪些参数
在 AGV、AMR、无人搬运车等设备里,控制器不仅要完成路径执行,还要同时处理传感器接入、驱动器通信、上位系统对接和本地安全策略。因此,很多设备厂和系统集成商会优先考虑嵌入式工控机作为核心控制平台,而不是直接使用普通商用电脑。对采购人员来说,选对一台合适的工控机,往往比单纯追求高配置更重要,因为 AGV 项目更看重接口适配、运行稳定性和维护周期。
一、为什么 AGV 控制器更偏向嵌入式工控机
AGV 的运行环境和普通办公计算场景不同。设备经常处于持续震动、频繁启停、空间受限和电源波动的状态,控制主机需要长期稳定工作。
- 机身更紧凑,便于放入车体、电控仓或顶部模块。
- 接口更贴近工业现场,常见有网口、USB、串口、CAN、DI/DO 等。
- 支持宽压供电,适合接入 AGV 电池系统或车载电源模块。
- 无风扇设计更常见,能减少灰尘吸附和后期风扇故障。
- 生命周期通常更长,方便设备厂做 3 到 5 年持续交付。
从这个角度看,工业控制计算机在 AGV 设备中不是简单替代 PC,而是承担了导航计算、设备通信和边缘控制的综合角色。
二、AGV 控制系统通常需要工控机承担哪些任务
一台用于 AGV 的工业计算机,通常会同时面对多个任务链路:
- 对接激光雷达、深度相机、编码器、惯导等传感器。
- 通过以太网、串口或 CAN 总线连接伺服驱动器、电机控制器和安全模块。
- 运行导航、定位、避障、调度客户端或本地任务程序。
- 与 MES、WMS、调度平台或电梯门禁系统通信。
- 本地记录运行日志、故障码和关键数据,便于售后排障。
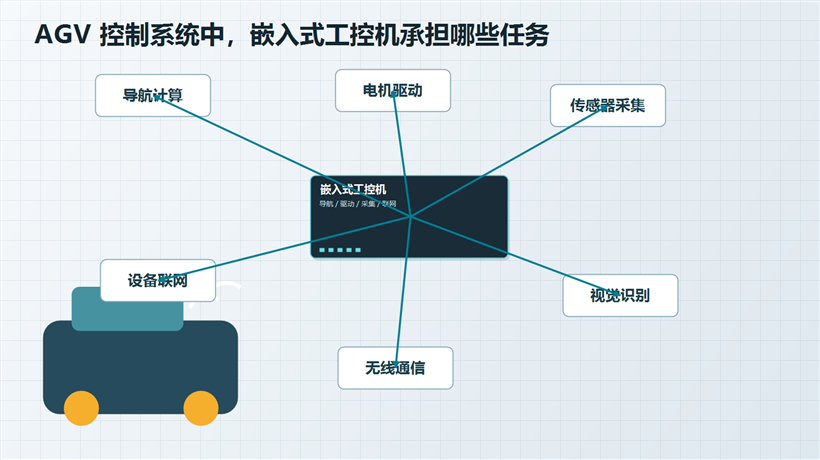
如果项目还涉及机器视觉识别、托盘定位或二维码导航,那么就不只是基础控制,还会对 CPU 性能、GPU 或 AI 加速能力提出更高要求。这时可以从普通嵌入式工控机升级到带推理能力的边缘计算工控机。
三、采购时最值得先看的 6 个参数
| 参数项 | 为什么重要 | AGV 场景建议 |
|---|---|---|
| 处理器性能 | 决定导航、调度客户端和视觉程序是否能并行运行 | 单导航控制可选中低功耗平台,视觉或多传感融合建议更高算力 |
| 网口与串口数量 | 影响雷达、PLC、驱动器、上位机接入方式 | 至少预留双网口,串口数量按电机、扫码器和调试需求核算 |
| CAN/DI/DO | 常用于车体控制、状态采集和安全联锁 | 优先选原生支持或可稳定扩展的机型 |
| 供电范围 | 车载电池系统波动较大,供电不稳会导致重启 | 关注宽压输入、浪涌保护和掉电恢复能力 |
| 散热与抗振 | 持续移动设备容易积热,也更容易受震动影响 | 优先无风扇结构,查看固定方式和整机抗振设计 |
| 存储方案 | 日志、地图、程序更新都依赖稳定存储 | 建议工业级 SSD,并确认断电后数据完整性策略 |
四、不同 AGV 项目,对配置的关注点并不一样
1. 牵引型或搬运型 AGV
这类项目更关注稳定性和接口适配。多数情况下,本地控制、调度通信、避障和基础数据采集是重点,未必需要很强的图像算力。采购时应把重心放在宽压输入、串口/CAN 数量和抗振设计上。
2. 仓储 AMR
仓储类项目经常需要对接二维码导航、货架识别、任务调度系统和无线网络,对网络稳定性、存储读写和多设备通信能力要求更高。如果设备需要高频更新地图或回传运行数据,双网口和稳定 SSD 会比单纯 CPU 主频更关键。
3. 视觉导航或复合机器人
如果 AGV 要同时做视觉识别、机械臂协同或复杂避障,就要评估是否需要 AI工控机 或支持 GPU/MXM/NPU 的平台。此时采购逻辑已经从“能跑控制程序”转向“控制+推理并行”,普通工业电脑未必合适。
五、工程上容易忽略的 4 个细节
- 不要只看现有接口数量,还要看后续是否方便扩展无线通信、IO 或存储。
- 不要只问 CPU 型号,要确认操作系统、驱动和导航软件是否兼容。
- 不要只比较采购单价,要评估长期供货、备件一致性和售后替换成本。
- 不要忽略安装结构,车体内部空间、线束走向和散热路径会直接影响落地效率。
六、什么时候该从嵌入式工控机升级到更高规格平台
当项目出现以下情况时,建议从基础型控制主机升级到更高规格的工业控制计算机:
- 需要同时跑视觉识别、激光 SLAM 和调度客户端。
- 单车接入传感器数量明显增多,通信负载持续上升。
- 车端需要做本地 AI 推理,而不是只接收云端或边缘节点结果。
- 项目计划批量交付,并要求平台在未来几年保持软硬件一致。

这类场景下,可以重点关注支持更强算力、更高带宽扩展和更完整工业防护设计的平台,而不是沿用早期样机阶段的低配方案。
七、采购沟通时建议直接问供应商的几个问题
- 该机型是否有 AGV、AMR、移动机器人相关应用经验?
- 是否支持宽压输入、来电自启、异常断电恢复?
- 网口、串口、CAN、GPIO 是否为原生接口,驱动是否成熟?
- 是否能提供长期供货周期说明和替代料策略?
- 若后续增加视觉或 AI 模块,平台是否还能扩展?
结语
AGV 小车控制器之所以常用嵌入式工控机,核心原因不在于“工业”两个字,而在于它更适合移动设备的接口结构、供电条件、散热方式和长期交付需求。对采购和项目负责人来说,选型时把控制任务、通信链路、安装空间和未来扩展一起看,通常比单点比拼参数更有效。真正合适的工控机,应当能让 AGV 项目在样机验证、批量交付和后期维护三个阶段都更省事。




售前电话:4008-616-216售前邮箱:sales@hwsys.cn
售后电话:4008-616-216售后邮箱:support@hwsys.cn
- 产品服务模块化工控机嵌入式工控机服务器/工作站标准主板AI人工智能计算模组工业平板电脑软件系统定制服务
- 解决方案矿山电力交通石化轨交储能水务机器人智能制造
- 服务与支持资料下载维修申请问题反馈
- 关于汉为公司介绍发展历程企业荣誉技术创新核心优势合作伙伴联系我们